自動運転シミュレーション
プラットフォーム
加速する仮想空間シミュレータ~
内閣府 戦略的イノベーション創造プログラム(SIP)の
SIP第2期「自動運転(システムとサービスの拡張)」
の研究成果である、
自動運転安全性評価のための
プラットフォーム
DIVP® (Driving Intelligence Validation Platform)を
製品化(以下、DIVP®製品)し提供しています。
ニュース
-
2025.04.10
お知らせ
ASAMから、OpenMATERIAL3Dのチュートリアルビデオがリリースされました。
-
2025.04.03
お知らせ
DIVPシミュレーターのOpenMATERIAL3Dに伴い、トライアルパッケージ(Ubuntu版)を提供いたします。
より多くの素材を活用して、よりリアルなシミュレーションを実行できるDIVPを是非お試しください。 -
2025.04.03
お知らせ
DIVPは、OEM及びTier1各社等と共にASAM OpenMATERIAL3Dの標準化を主導し、2025年4月3日に国際標準としてVer.1がリリースされました。 今後、各社からOpenMATERIAL3Dに対応した様々なアセットのリリースが想定され、DIVP上でそれらのアセット類を動かすことが可能となります。
はじめに
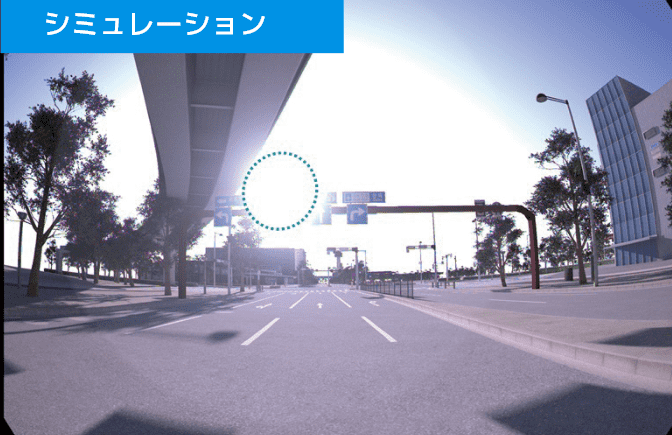
様々な交通環境下で、現実空間の実車評価を再現する
実現象との一致性の高いセンサシミュレーションを実現
センサ出力例
-
カメラ
-
ミリ波
-
LiDAR
DIVP®とは
2018年末より、各センサメーカ、ソフトウェア企業、
大学からなる産学10機関(現在)が協力して
コンソーシアム形式の研究開発である
Driving
Intelligence Validation
Platform(以下、DIVP®)プロジェクトを開始。
実現象と一致性の高いセンサモデルに着目した仮想空間での自動運転安全性評価
シミュレーション基盤の構築を目指している。
DIVP®製品について
Mission
自動運転車の安全性評価の課題と
DIVP®製品の目指すもの
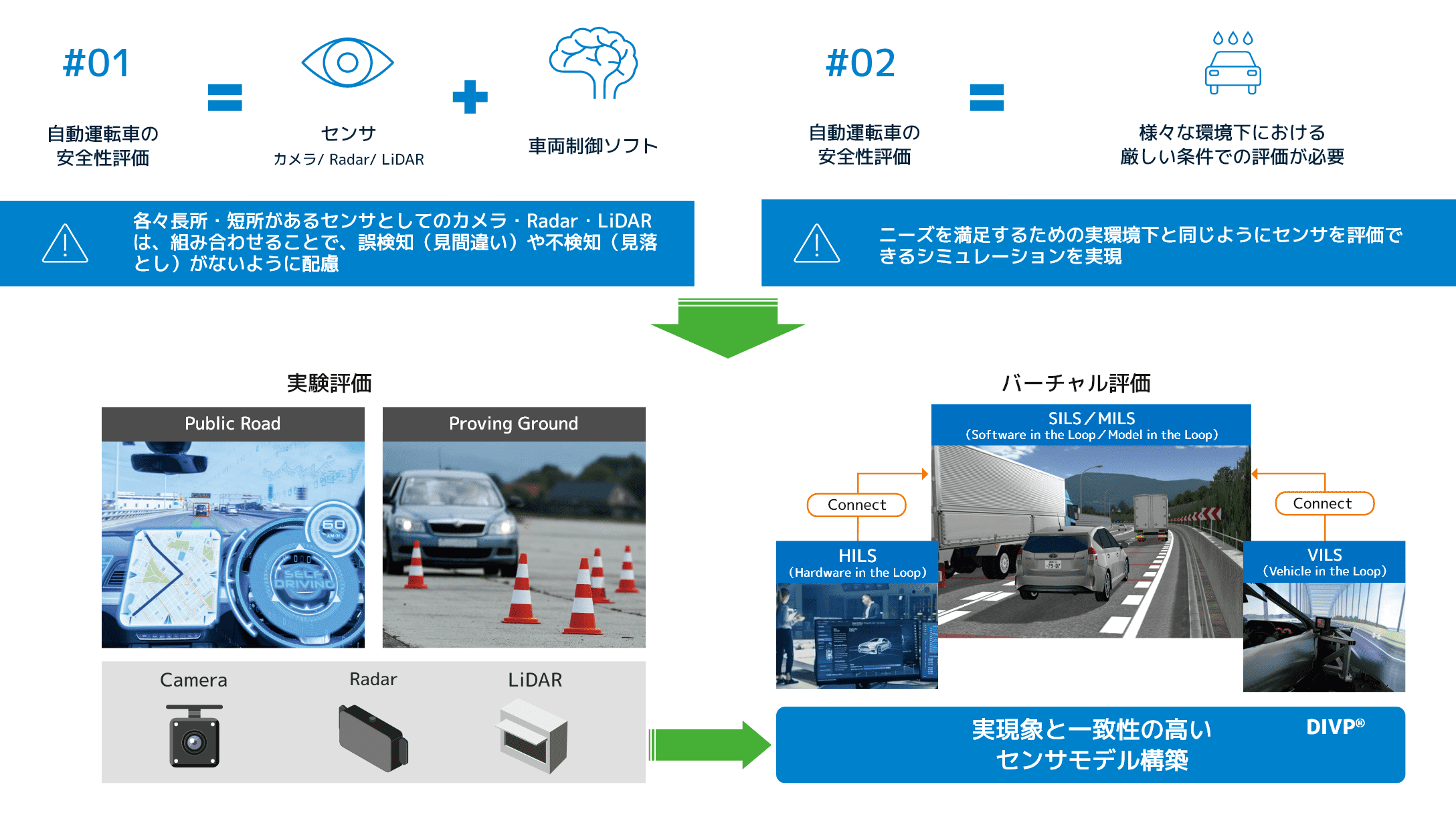
Special Feature
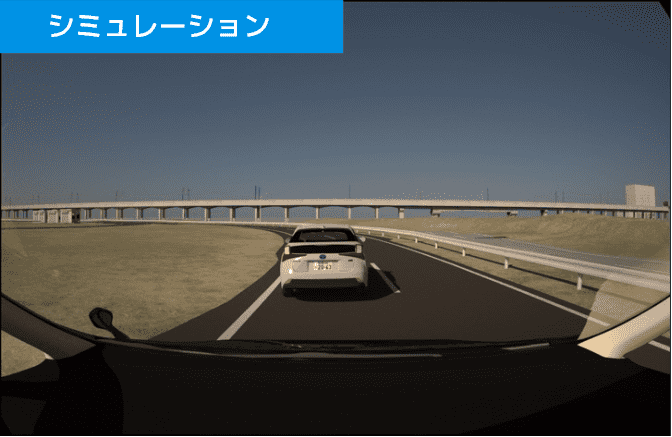
実現象と一致性の高いシミュレーションモデル
センサ出力を精緻に再現するため、センサ検出原理、
使用電磁波帯域における物理現象を、
反射物性原理に基づきモデリングし、
実車試験結果と比較して一致性を検証。
カメラ出力例と実画像の比較
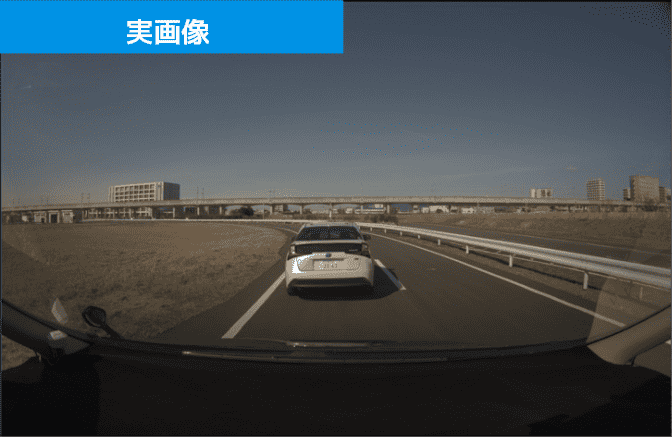
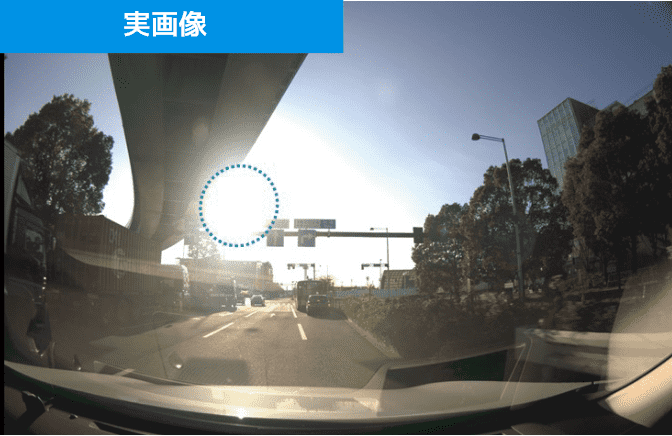
Source: Kanagawa Institute of Technology, AD-URBAN, SOKEN, Sony Semiconductor Solutions
Way to use
センサユニットや自動運転システムの
企画・開発から、
評価・適用までの
一貫したプロセスを支援
仮想空間上に現実環境を精緻に再現。
モデルベース開発におけるセンサユニットや
自動運転システム企画・開発の初期工程から、
実車同等のシステムの評価・適用までを支援。
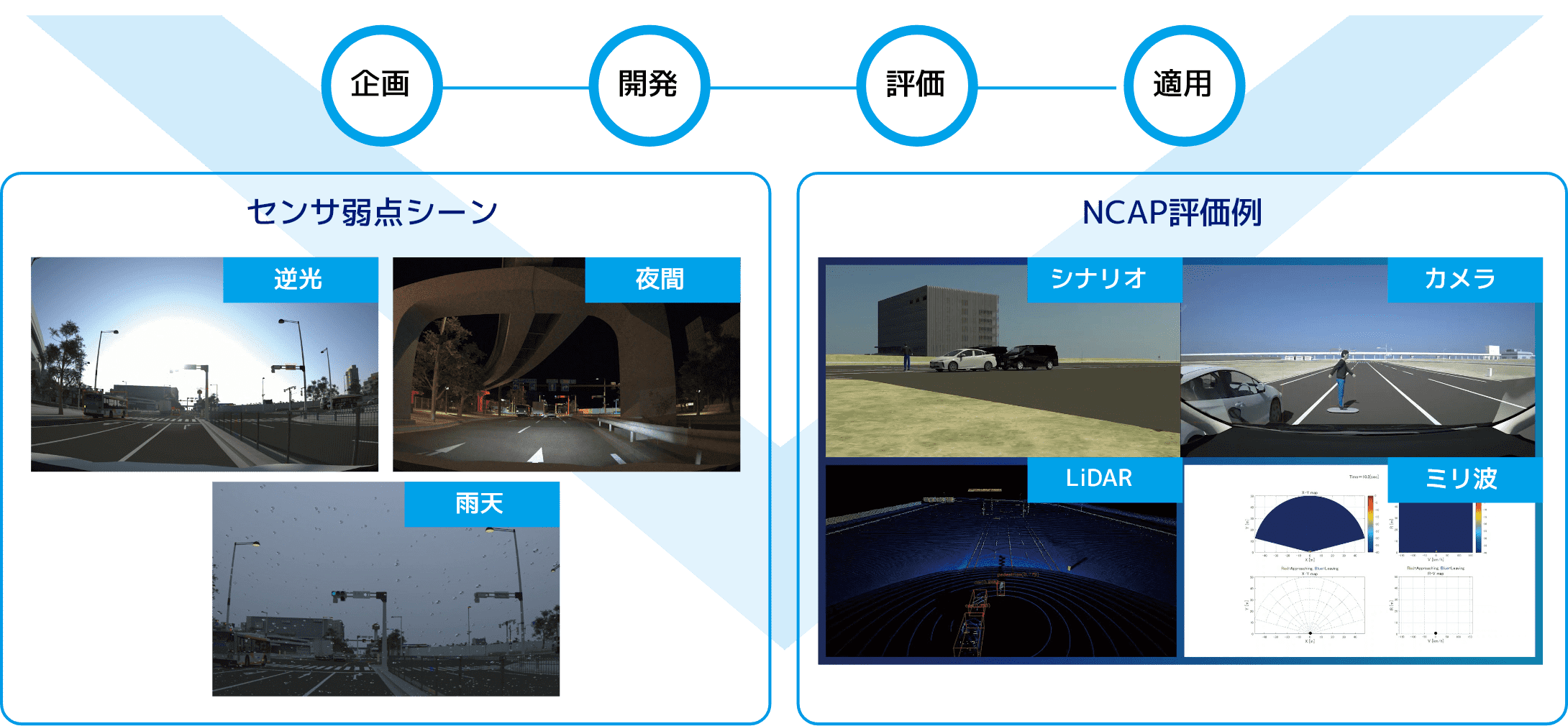
各工程におけるシミュレーションの適用イメージ。
リンク集
-
持続可能な社会の創出に貢献する唯一無二の企業へ
-

ロケーションフリーで即座にお客様の解析を実現し、開発者の意思決定を加速させるクラウド解析プラットフォーム